
アップデート概要
バージョン5.0では、産業分野におけるSpotとOrbitを活用した検査の作業効率を高めるための新機能が多数追加されています。また、Orbitの導入方法や、ロボットおよびペイロードのソフトウェア更新に関する選択肢も拡充されています。
本リリースの主なハイライトは以下の通りです。
- ● タブレットユーザープロファイル– 産業用検査や公共安全など、よく使われる用途に合わせてカスタマイズ可能な3種類のプロファイルを、Spotタブレットアプリで設定できます。
- ● デュアルモードWi-Fi– タブレットをSpotに直接接続して手動操作やAutowalkの記録を行いながら、同時にSpotを施設の無線ネットワークやインターネットにも接続しておくことができます。
- ● Orbit for Enterprise– 複数のOrbitインスタンスからのデータを統合し、すべての拠点とロボットの状況を俯瞰できる新しいダッシュボードビューを提供します。
- ● Orbitの仮想マシン展開– Orbitを任意のサーバー上で仮想マシンとして実行できるようになりました。
- ● Site View(サイトビュー)– ロボットの視点で現場を把握できるOrbitの新機能群で、資産のモニタリングや検査の作成をOrbit上で効率的に行えるようになります。
- ● Orbitからロボットソフトウェアの更新– ロボットおよびペイロードのソフトウェアをまとめてバンドルし、ボタン一つで全 fleet に展開できるようになりました。
バージョン5.0では、データプライバシーの強化や、Orbit内からアクションを新たに作成する方法、その他多くの修正や改善も含まれています。詳細については、以下をお読みください。

Boston
Dynamicsの日本語字幕付きウェビナーはこちらからご視聴ください。
本リリースの新機能 Spotに関する新機能
タブレットユーザープロファイル
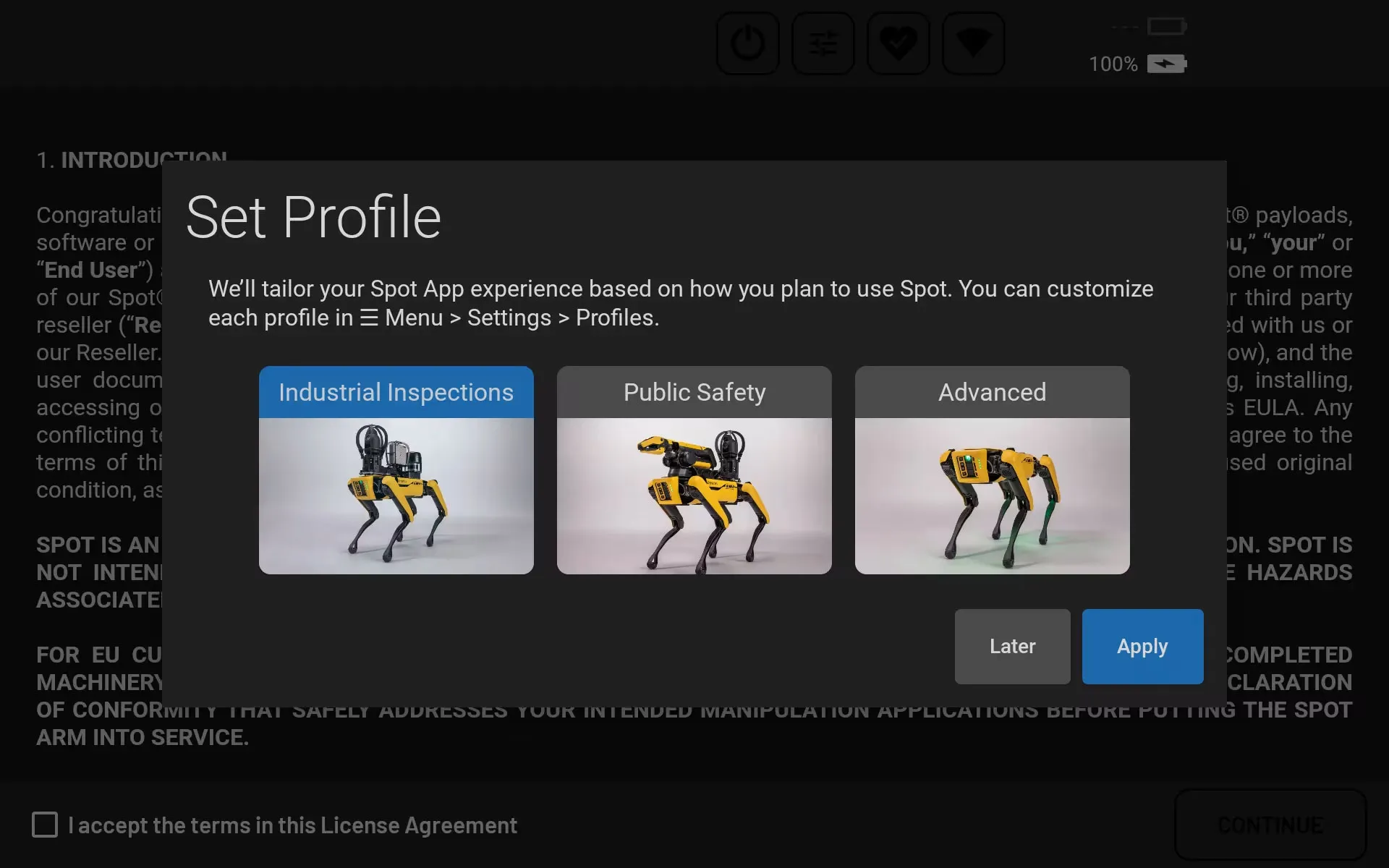
Spotアプリを新規インストールまたはアップグレードした際のプロファイル設定。
Spotアプリをバージョン5.0にアップグレードした後、初回起動時にSpotの使用目的に応じて最適化された3種類のUIプロファイルの中から1つを選択するよう求められます。不要な機能はデフォルトで非表示となり、各プロファイルごとに機能のオン・オフを切り替えてカスタマイズすることが可能です。 デフォルトのプロファイルは、Spotの代表的な使用ケースに基づいて設計されています。
- ● 産業用検査– Spotの操作や、マップ・ミッション・アクションの記録を効率化するAutowalkワークフローに特化した機能を備えています。
- ● 公共安全– Spotの操作に加え、Spot Armを活用して周囲の物体を操作するための機能が搭載されています。
- ● 上級者向け– すべての機能を含みますが、一般的なユーザーには推奨されません。
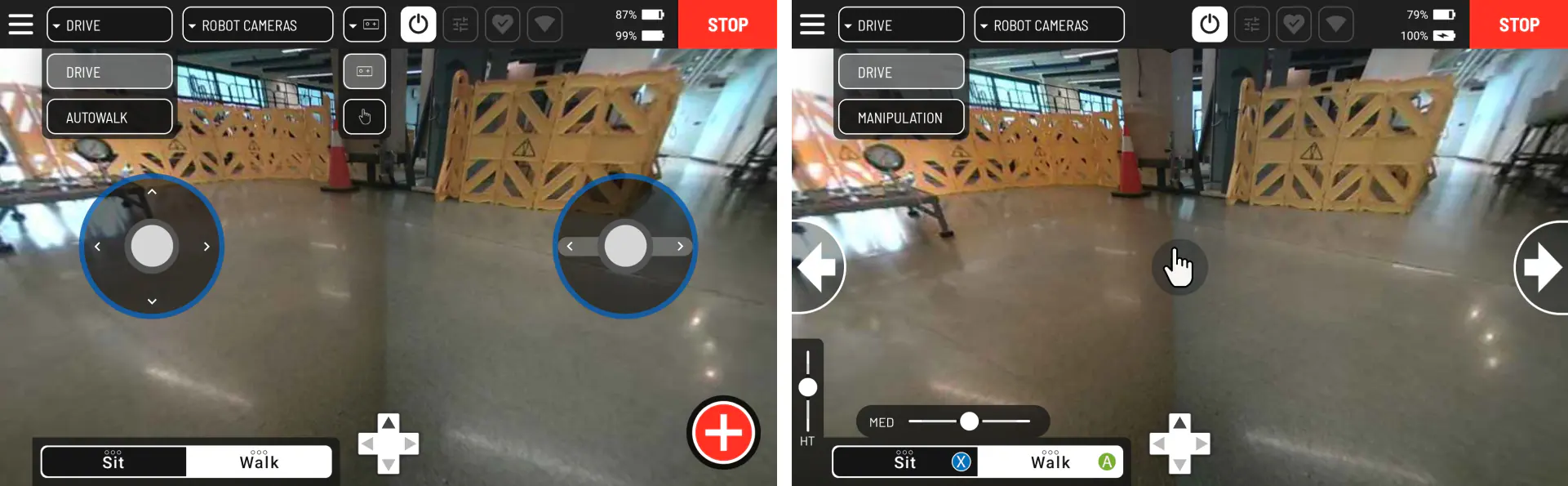
産業用検査プロファイル(左)と公共安全プロファイル(右)のDrive画面を並べて比較。
選択したプロファイルはタブレット本体に適用され、特定のロボットに接続する際のユーザー認証情報には依存しません。タブレットを使用する各ユーザーは、必要に応じてプロファイルを素早く切り替えたりカスタマイズしたりすることができます。
Dual-mode WiFi
Spotは、クライアントモードとアクセスポイントモードのWi-Fiを同時に動作させることが可能になりました。これは、SpotをクライアントデバイスとしてWi-Fiネットワークに接続し、同じチャネル上でバックグラウンドにアクセスポイントを稼働させることで実現しています。
 詳細については、「
SpotデュアルWi-FiモードでのSpotの使用方法」をご参照ください。
詳細については、「
SpotデュアルWi-FiモードでのSpotの使用方法」をご参照ください。
リレー制御によるドア開閉
SpotはAutowalkミッション中にリレー制御のドアを開けることができるようになりました。Autowalkミッションに組み込むと、Spotはドアの前で停止し、ドアが開くのを待ってから通過し、ミッションを続行します。
Spotが通過するドアには、自動ドアオープナーと動作検知または人感センサーが設置されている必要があります。自動ドアオープナーは動作センサーにリレー接続されており、Spotがセンサーを作動させるとドアのリレーが動作し、ドアが開きます。
現場の設備担当者や地元のドア専門業者と連携して、自動開閉機能を備えたドアの設置を進めてください。
Orbitの新機能
Orbit for Enterprise
Orbit for Enterprise
は、複数のOrbitインスタンスからのデータを統合し、すべての拠点とロボットの状況を俯瞰できる新しいビューです。これにより、ロボット
fleet 全体の状態やパフォーマンスをより簡単に監視できるようになります。
SOrbit for
Enterpriseはハブ&スポークモデルで動作します。1つのインスタンスがEnterpriseダッシュボードのホストに指定され、他のインスタンスからデータを集約します。各「サテライト」Orbitインスタンスからホストインスタンスへのネットワーク接続が必要です。
ユーザーのEnterpriseアクセスはホストインスタンスで管理され、サテライトインスタンスごとのアクセスは個別に管理されます。Enterpriseアクセスを持つユーザーは、サテライトインスタンスそれぞれのログイン資格がなくても、すべてのサテライトインスタンスから集約されたデータを閲覧できます。
仮想マシンとしてのOrbit展開
Orbitは、任意のサーバー上で仮想マシン(VM)として実行できるようになりました。これは特に複数のOrbitインスタンスを必要とする組織にとって、柔軟かつスケーラブルな展開方法です。
Boston Dynamicsは、VMWare、Hyper-V、AzureへのOrbit
VM展開をサポートしています。
Orbitからのロボットソフトウェア更新
ロボットとOrbitの両方がバージョン5.0以降にアップグレードされると、ロボットおよびペイロードのソフトウェアをOrbit内でバンドルし、そのバンドルを無線で一括配信することで、今後のアップデートを展開できるようになります。複数のバンドルを管理して、異なるロボット構成やソフトウェアバージョンに対応でき、任意の台数のロボットへ同時に配信が可能です。
Site Viewでマップを確認する
Spotアプリを新規インストールまたはアップグレードした際のプロファイル設定。
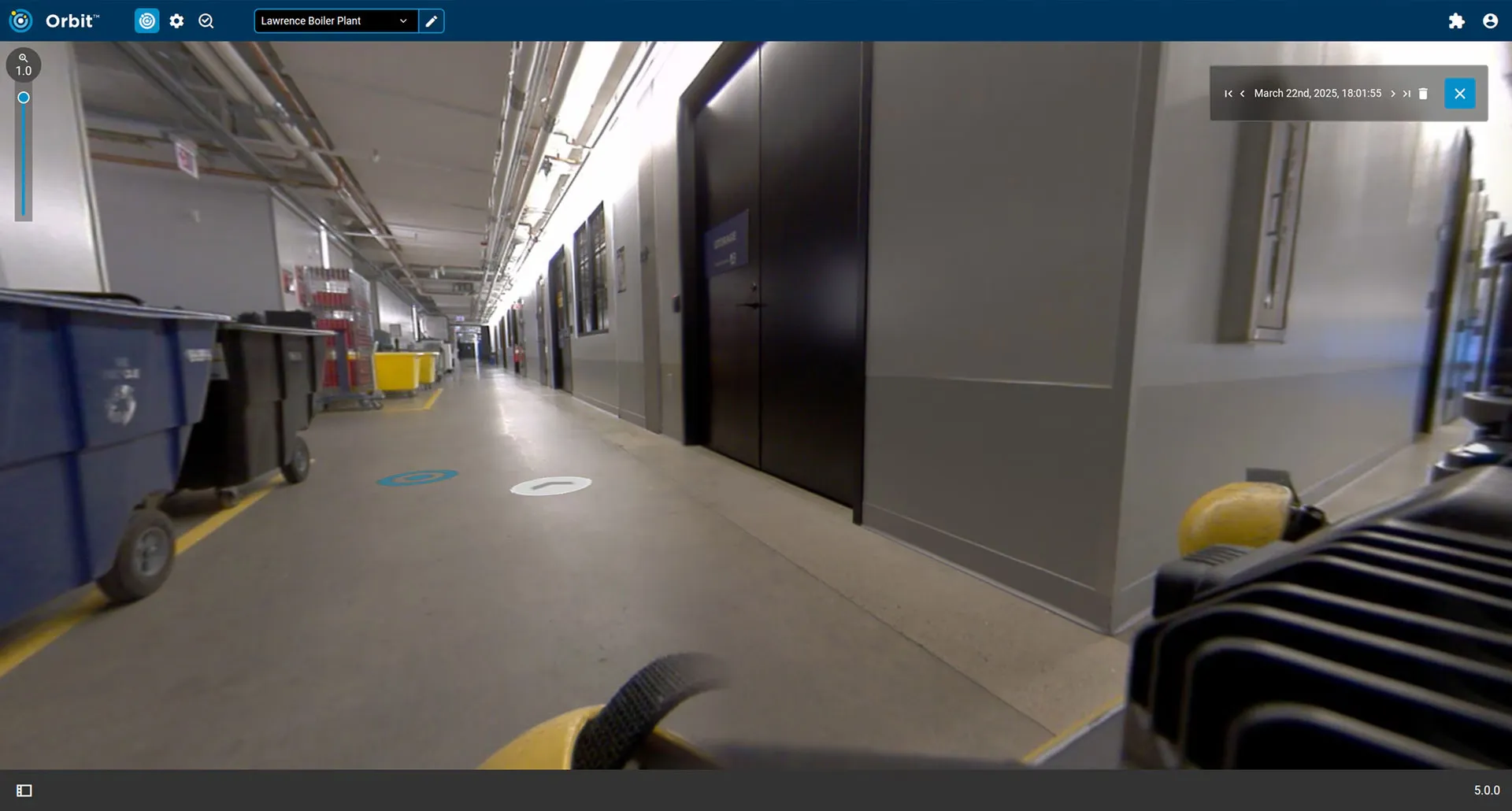
Site
Viewは、Spotが撮影したパノラマ画像をもとに、ロボットの視点で現場を把握できる機能です。仕組みは以下の通りです。:
- 1.Spotは、既存のサイトマップ内のルートを歩きながら、数カ所ごとにパノラマ画像を収集します。
- 2.OrbitのホームページからSite Viewに入り、マップをナビゲートして各ウェイポイントでSpotの視点からの映像を確認できます。ウェイポイント間を移動したり、時間を前後にさかのぼったりして探索することも可能です。
- 3.Orbitのサイトマップエディターでは、任意のウェイポイントでSite Viewを開き、新しい検査を作成して直接ミッションに追加できます。これにより、新たにAutowalkの記録を作成・アップロードする必要がなくなります。
詳しくは、以下をご覧ください。
サイトマップへの検査追加の新しい方法
バージョン5.0では、サイトマップに新しい検査を追加するための複数の新機能が導入されました。これらの機能により、記録プロセスの簡略化やスキップが可能となり、新しい資産の検査を手軽に追加できるほか、AIモデルを活用して新たな洞察を得ることができます。
Site Viewで検査を作成
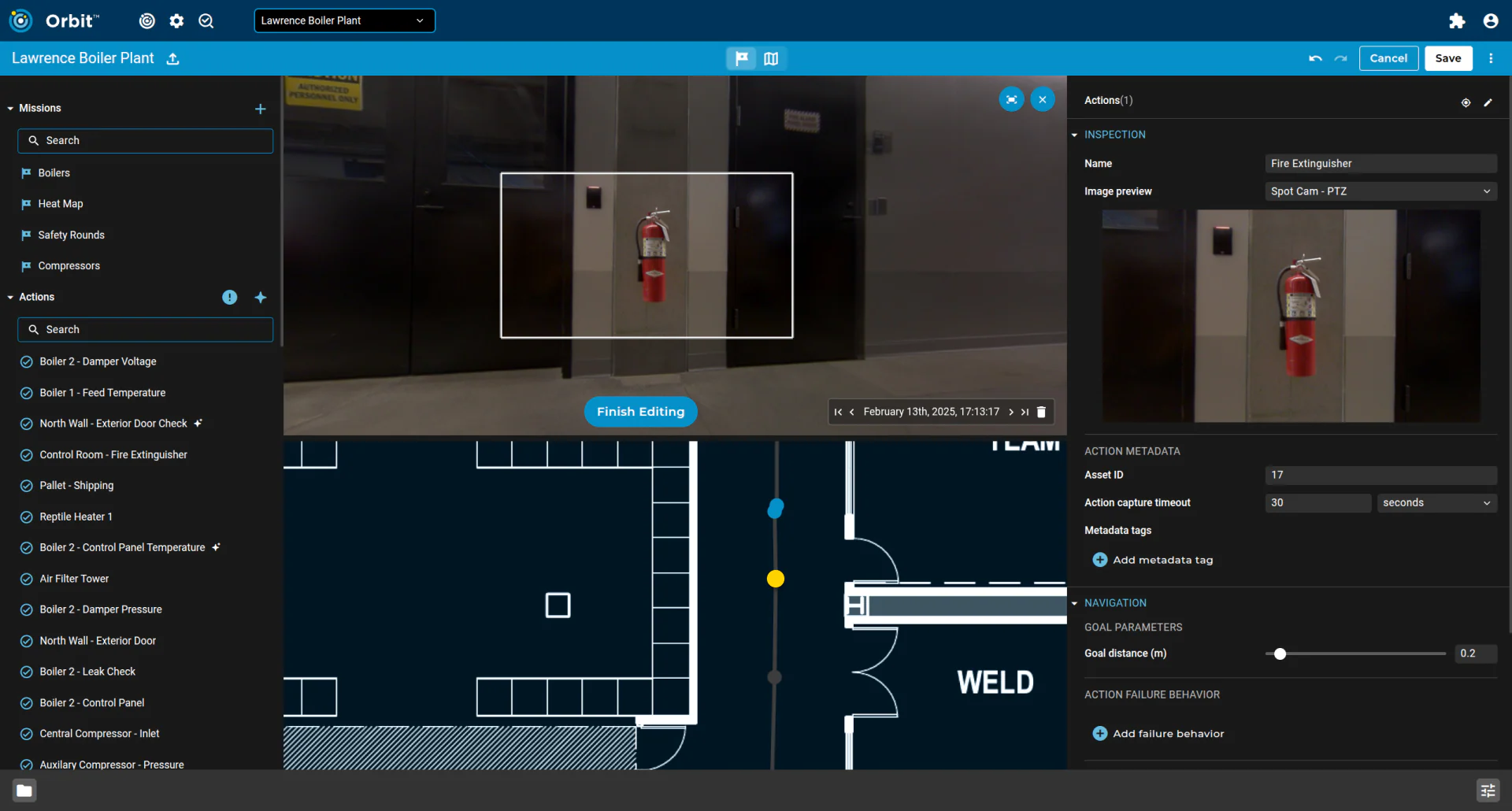
Orbitのサイトマップエディターで、Site
Viewを使って新しい検査を作成する様子。
ロボットが収集したSite
Viewのパノラマ画像を利用すれば、Orbitのマップエディター内で直接、新しい映像検査やサーマル検査を作成できます。わざわざロボットを現場に出動させて手動で検査を記録する必要はありません。Site
Viewに入り、カメラを向けて検査内容を設定し、そのままミッションに追加するだけです。
AI映像検査
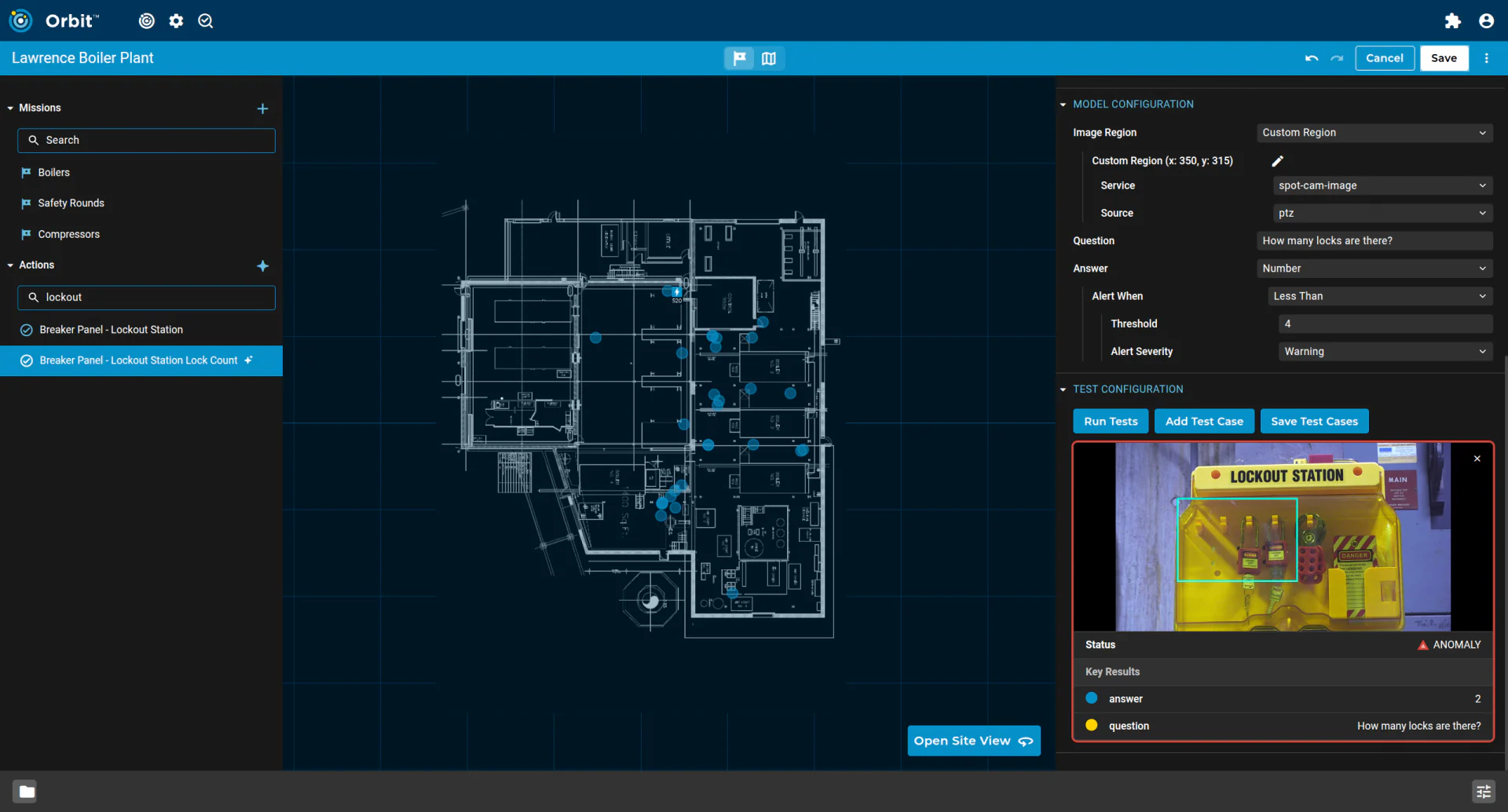
安全ステーションにロックアウトタグが正しく設置されているかどうかを確認する、AI駆動型検査の設定とテストの様子。
AI映像検査拡張機能を利用すると、ロボットが収集した画像の内容について質問に答えることのできる、事前学習済みのビジョン・ランゲージAIモデルにアクセスできます。主な用途としては、安全確認、メーターの読み取り、物体認識などが挙げられます。
たとえば、AI映像検査では次のような質問に答えることができます:
- 「シャベルはありますか?」
- 「ロックはいくつありますか?」
- 「画面には何と表示されていますか?」
- 「床は濡れていますか?」
これにより産業用検査の可能性が大きく広がります。現場の状況に関する貴重な映像情報を収集し、異常時にはアラートを受け取ることができるため、チームメンバーはより付加価値の高い業務に集中できるようになります。
既存ルート上でのアクション記録
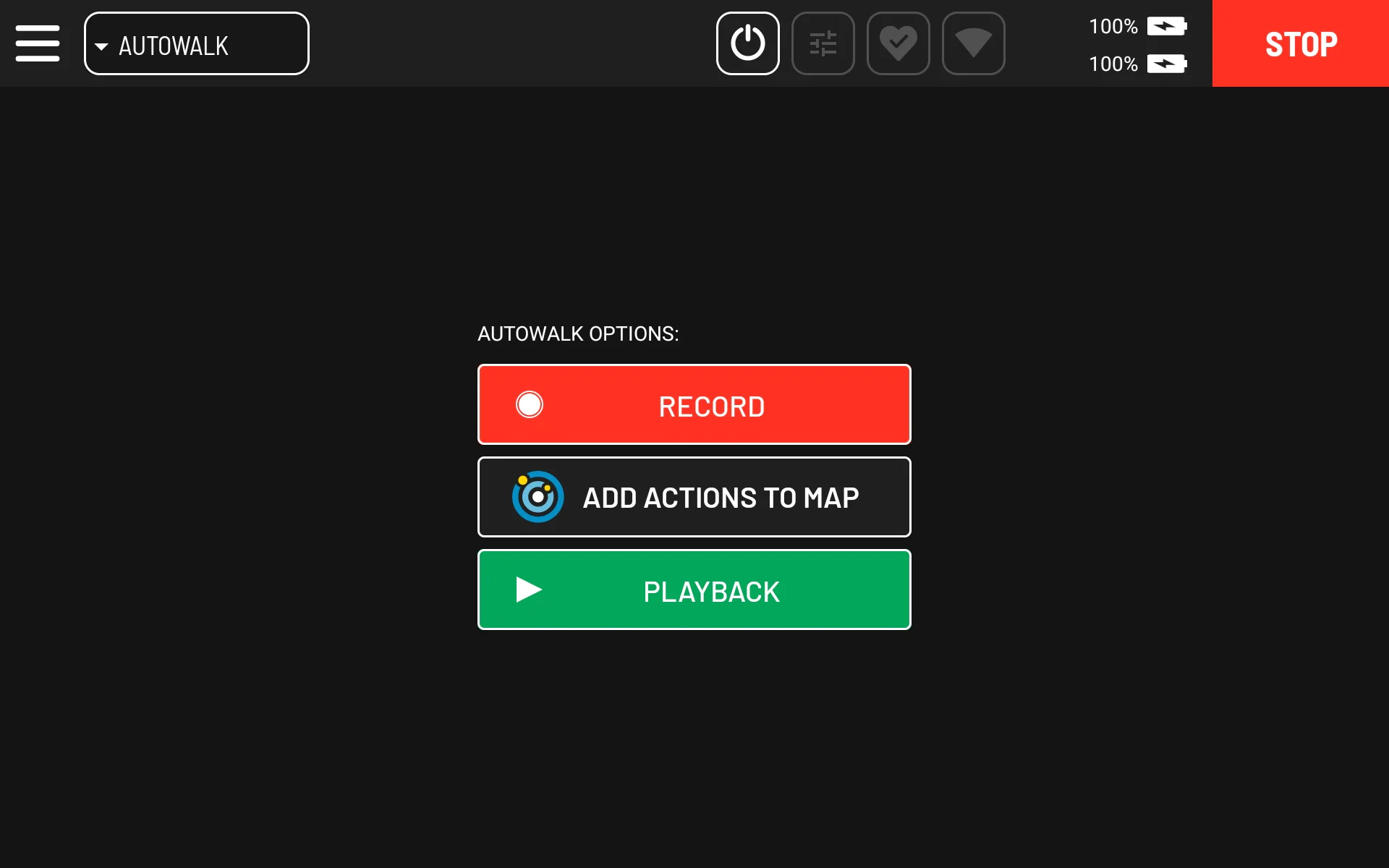
Orbitに接続されたロボット向けの、Spotアプリの新しい記録オプションです。
Site
Viewで作成できない検査に対応するため、バージョン5.0では、タブレットコントローラーとOrbit間をシームレスに連携させる簡易化されたAutowalk記録ワークフローが導入されました。Orbitのサイトマップをロボットに直接アップロードし、タブレットからロボットに接続して簡易記録モードに入ることで、既存のマップルート上に素早くアクションを追加できます。
この方法で記録された検査は、自動的にOrbitにアップロードされてサイトマップに追加され、ミッションへの割り当ても可能です。このワークフローにより、サイトマップをシンプルに保ちながら、追加のAutowalk記録を手動でアップロードする手間を省けます。
検査設定の新ツール
多角形の関心領域(ROI)
AI映像検査など一部の検査タイプでは、多角形の関心領域(ROI)を設定できるようになりました。これにより、収集した画像をより正確に解析することが可能です。例えば、下の画像では、多角形の関心領域を緊急出口への通路に沿って設定し、通行のない床の部分を除外して水たまりの有無をチェックしています。

多角形の関心領域は、AI検査に対して画像の特定部分に注目するよう指示します。
自動アラート閾値
サーマル検査など一部の検査タイプでは、自動アラート閾値に対応しました。手動で閾値を設定する代わりに、Orbitがサンプルデータを収集して検査対象の資産にとって正常な値を判定し、その結果をもとに自動で閾値を設定します。
強化されたデータ保護とプライバシー
バージョン5.0では、Boston
Dynamicsに共有するデータの管理がより細かくできるようになり、ロボットが収集した画像に写る人物のプライバシー保護を支援する機能も追加されました。
主な変更点は以下の通りです:
Orbitログの共有に関して、Site
ViewやAI映像検査のデータを含めるかどうかなど、より細かい設定が可能になりました。
- ● Orbitログの共有に関して、Site ViewやAI映像検査のデータを含めるかどうかなど、より詳細な選択肢が用意されました。
- ● 共有されるログファイルに含まれる画像の顔部分をぼかすオプションが追加されました。
- ● Orbitユーザーが閲覧可能なすべてのSite View画像および映像検査結果の顔部分をぼかすオプションが追加されました。
- ● 個別のSite View画像や検査記録を削除できる機能が追加されました。
データ共有とプライバシー管理の詳細については、「データ管理」内の
【Orbit管理者設定】およびSpotプライバシー通知をご参照ください。また、Site
Viewや検査履歴からの画像削除方法については、Site Viewでマップを探索する」と
Orbitで検査データを閲覧・分析する」をご参照ください。
Robot Time Zone
Orbitには新たに「ロボットのタイムゾーン設定」(設定 >
スケジューラー)が追加されました。これはロボット群が所在するタイムゾーンを示しており、ご自身のタイムゾーンやOrbitサーバーのタイムゾーンとは異なる場合があります。
ログイン時にロボットのタイムゾーン設定を求められ、設定が完了するまでスケジュールされたミッションは起動されません。
スケジュールされたミッションの開始時刻は現在のタイムゾーン設定に基づくため、5.0にアップグレードする際は調整が必要になる場合があります。例えば、以前はOrbitサーバーとロボットのタイムゾーン差を考慮して開始時刻を調整していた場合、ロボットのタイムゾーンに合わせてスケジュールを再設定する必要があります。
複数のタイムゾーンにまたがるロボットを1つのOrbitインスタンスで管理する稀なケースでは、「ホーム」タイムゾーンを選択し、それ以外のタイムゾーンにあるロボットのスケジュールは引き続き調整する必要があります。
Orbitのタイムゾーン設定は1時間単位の増分に対応しており、30分単位などの端数時間を選択すると表示やミッション開始時刻に誤差が生じる可能性があります。
修正点と改善点
- ● Orbitは、ロボットのタイムゾーン設定に基づいてサマータイム(DST)を自動的に処理するようになりました。これにより、スケジュールされたミッションはサマータイムに応じて自動で調整されます。
- ● Autowalkミッション再生中に撮影されたズームインされたPTZ画像の精度が向上しました。
- ● 天候に対応したミッションスケジュール機能がOrbitの標準機能として組み込まれ、ロボット単位のライセンスは不要になりました。Orbitに接続されたすべてのロボットが、天候対応スケジュールを利用するミッションに割り当て可能です。
- ● orbitは1インスタンスあたり最大20台のロボット接続をサポートするようになりました。これはSite Hub上、クラウド上、または仮想マシンとして稼働しているOrbitすべてに適用されます。
- ● Orbitの検査結果にヒストグラムチャートが追加されました。ヒストグラムチャートは類似した結果をグループ化し、検査のアラート閾値と比較した全体の分布を視覚的に表示します。
- ● Spotアプリは、SV600のファームウェアがバージョン2.14.6より古い場合、ハードウェアの安全性に問題がある旨の警告を表示するようになりました。詳しくは「Fluke SV600に関するお客様向けセキュリティ勧告」(ログイン必要)をご確認ください。
現在確認されている事象
- ● Orbitサイトマップエディターでは、音響検査に関する関心領域の追加や編集はできません。関心領域を追加する場合は、設定 > ミッションとアクション(Settings > Missions and Actions)からアクションを編集してください。
- ● Orbitサイトマップエディターで「ロボットにマップをアップロード(Upload map to robot)」するとき、ロボットがマップにローカライズできない場合、「グラフを生成中…」で処理が止まることがあります。これは通常、間違ったマップをアップロードしたか、アップロード先のロボットを誤って選択したことが原因です。ただし、ロボットの充電ドックなどの近くにあるフィデューシャルマーカーが遮られている、破損している、または欠落している可能性もあります。


